세 방향의 축
ROLL : 오른쪽, 왼쪽 바퀴의 들림 정도
PITCH : 앞, 뒤의 들림 정도
YAW : 좌회전 우회전 정도
/imu 토픽
- 타입 : sensor_msgs/imu
- 구성
std_msgs/Header header
unit32 seq
time stamp
string frame_id
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w // Quaternion 기울어짐 정도RVIZ에서 IMU 시각화하기
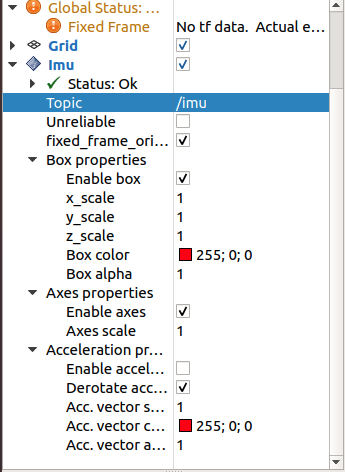
rviz_imu_plugin 을 catkin_make한 후 rviz 실행 후 add를 눌러 rviz_imu_plugin의 imu 선택 후 추가
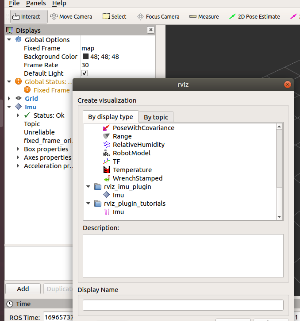
imu를 아래와 같이 설정
IMU 데이터로 RVIZ 뷰어의 박스 조작
#! /usr/bin/env python
import rospy, math, os
from sensor_msgs.msg import Imu
from tf.transformations import euler_from_quaternion
degrees2rad = float(math.pi)/float(180.0)
rad2degrees = float(180.0)/float(math.pi)
name = " >> ./imu_data.txt"
def call_back(data):
global degrees2rad
global rad2degrees
euler = euler_from_quaternion((data.orientation.x, data.orientation.y, data.orientation.z, data.orientation.w))
euler = [euler[0], euler[1], euler[2]]
save_str = "roll : " + str(euler[0]) + ", " + "pitch : " + str(euler[1]) + ", " + "yaw : "+ str(euler[2])
command = 'echo "' + save_str + " >> ./imu_data.txt"
print(command)
os.system(command)
def listener():
rospy.init_node('imu_data_maker', anonymous = False)
rospy.Subscriber('imu', Imu, call_back)
if __name__ == "__main__":
listener()
try:
rospy.spin()
except KeyboardInterrupt:
print("Shutting down")위 코드는 IMU 토픽을 받아 imu_data.txt 파일을 만드는 코드이다. 이 코드로 만들어진 파일의 일부는 다음과 같다.
roll : -3.11715804406, pitch : -0.0532325421858, yaw : -0.365821011218
roll : -3.11733257699, pitch : -0.0532325421858, yaw : -0.365821011218
roll : -3.11733257699, pitch : -0.0528834763354, yaw : -0.365821011218
roll : -3.11820524161, pitch : -0.0514872129338, yaw : -0.365821011218
roll : -3.11977603794, pitch : -0.0492182849062, yaw : -0.365646478293
roll : -3.12099776842, pitch : -0.0486946861306, yaw : -0.365646478293
roll : -3.12221949889, pitch : -0.047298422729, yaw : -0.365646478293목표: imu_Data.txt의 데이터를 읽어 imu_generator.py로 가공하여 rviz 뷰어에 표시
1. 패키지 생성: catkin_create_pkg rviz_imu_cpp roscpp tf geometry_msgs urdf rviz xacro
2. rviz 파일 복사 저장
3. launch 파일 작성
rviz_imu_cpp
│ ├── CMakeLists.txt
│ ├── include
│ │ └── rviz_imu_cpp
│ ├── launch
│ │ └── imu_generator_cpp.launch
│ ├── package.xml
│ ├── rviz
│ │ └── imu_generator.rviz
│ └── src
│ ├── imu_cpp.cpp
│ └── imu_data.txt// launch 파일
<launch>
<!-- rviz display -->
<node name="rviz_visualizer" pkg="rviz" type="rviz" required="true"
args="-d $(find rviz_imu_cpp)/rviz/imu_generator.rviz"/>
<node name="imu_generator" pkg="rviz_imu_cpp" type="imu_cpp" />
</launch>#include <iostream>
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
#include <tf2/LinearMath/Quaternion.h>
#include <fstream>
#include <vector>
using namespace std;
using namespace ros;
int main(int argc, char** argv)
{
init(argc, argv, "imu_generator");
NodeHandle nh;
Publisher pub = nh.advertise<sensor_msgs::Imu>("imu", 1);
sensor_msgs::Imu imumsg;
imumsg.header.frame_id = "map";
Rate rate(5);
ifstream file("/home/jagbum/xycar_ws/src/rviz_imu_cpp/src/imu_data.txt");
string line;
while (getline(file, line))
{
istringstream iss(line);
vector<double> extract;
string token;
while (getline(iss, token, ','))
{
extract.push_back(stof(token.substr(token.find(":") + 1)));
}
tf2::Quaternion quaternion;
quaternion.setRPY(extract[0], extract[1], extract[2]);
cout << quaternion.x()<<" "<< quaternion.y() <<" "<< quaternion.z()<<" "<< quaternion.w()<< endl;
imumsg.orientation.x = quaternion.x();
imumsg.orientation.y = quaternion.y();
imumsg.orientation.z = quaternion.z();
imumsg.orientation.w = quaternion.w();
pub.publish(imumsg);
extract.clear();
rate.sleep();
}
file.close();
return 0;
}
'ROS' 카테고리의 다른 글
| ROS 초음파센서 (0) | 2023.10.10 |
|---|---|
| ROS 라이다 (1) | 2023.10.09 |
| RVIZ Odometry (0) | 2023.10.05 |
| RVIZ (0) | 2023.10.05 |
| ROS 노드 통신 문제 (0) | 2023.10.03 |